
具有行走和攀爬机构的直线跟随机器人车辆
用于各种目的并在编程技术的帮助下控制和操作的机电设备或机器被称为机器人。机器人根据其应用有多种类型,例如工业。。。
用于各种目的并在编程技术的帮助下控制和操作的机电设备或机器被称为机器人。基于其应用,机器人有多种类型,如工业机器人、军用机器人、太空机器人、家用机器人、步行机器人、攀爬机器人等。最先进的机器人项目正在开发中,可在多个应用的各个领域有效使用。在这篇文章中,让我们讨论一种特殊类型的机器人项目,即具有行走和攀爬机构的直线跟随机器人车辆。
机器人车辆
机器人飞行器是一种特殊类型的机器,设计用于在地面、空中、水下和太空中自主移动,无需载人。这些机器人车辆由各种基于传感器的控制系统控制和操作。机器人车辆专门设计用于人类无法进入的条件,如火灾事故、极高或极低的温度等。,。
直线跟随机器人
通过沿着特定路径或路线移动的机器人车辆可以被称为直线跟随机器人。这些直线跟随机器人专门用于工业应用中的特殊用途,例如通过沿着特定的直线从一个点(发电单元)到另一个点,运输各种零件或机械或车辆(汽车、自行车等)。
具有行走和攀爬机构等特殊功能的机器人车辆的法线是工科学生感兴趣的机器人项目之一,可用于多种应用。设计具有行走和攀爬机构的直线跟随机器人的简单步骤如下所示。
步骤1:收集所需组件
根据机器人的应用情况,对带有行走和攀爬机构的机器人车辆后面的设计线所需的部件进行估计。根据要求,收集所有电气和电子部件,如电阻器、电容器、红外发射器、直流电机、晶体管、机器人机身和具有适当额定值的光电二极管,以及其他部件,如纸板、螺栓、螺母、铝条等。
步骤2:分析直线跟随机器人的电路
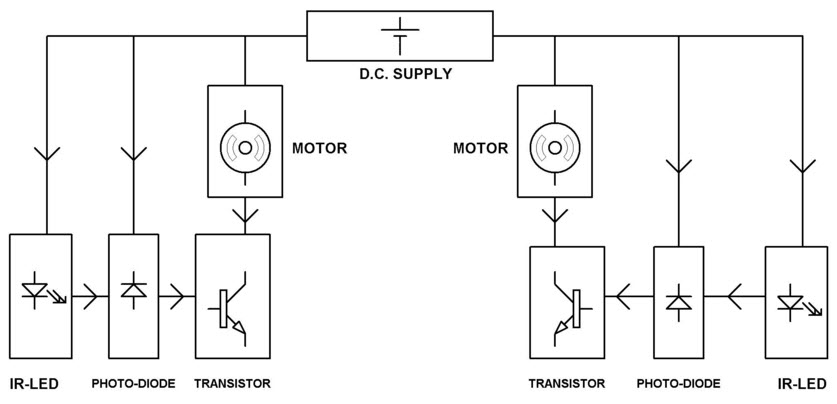
初步设计了带有电源块、IR LED和光电二极管块等各种块的项目电路框图。收集组件后,根据使用的各种组件的工作情况分析电路设计。然后,在将电路组装到PCB上之前,根据电路图将组件放置在无焊面包板上,使用连接线测试电路工作情况。通过在无焊面包板上测试电路,如果电路或组件的额定值需要任何变化,那么可以很容易地进行更换,而不会浪费更换组件或改变电路设计的金钱和时间。
步骤3:组装和焊接部件
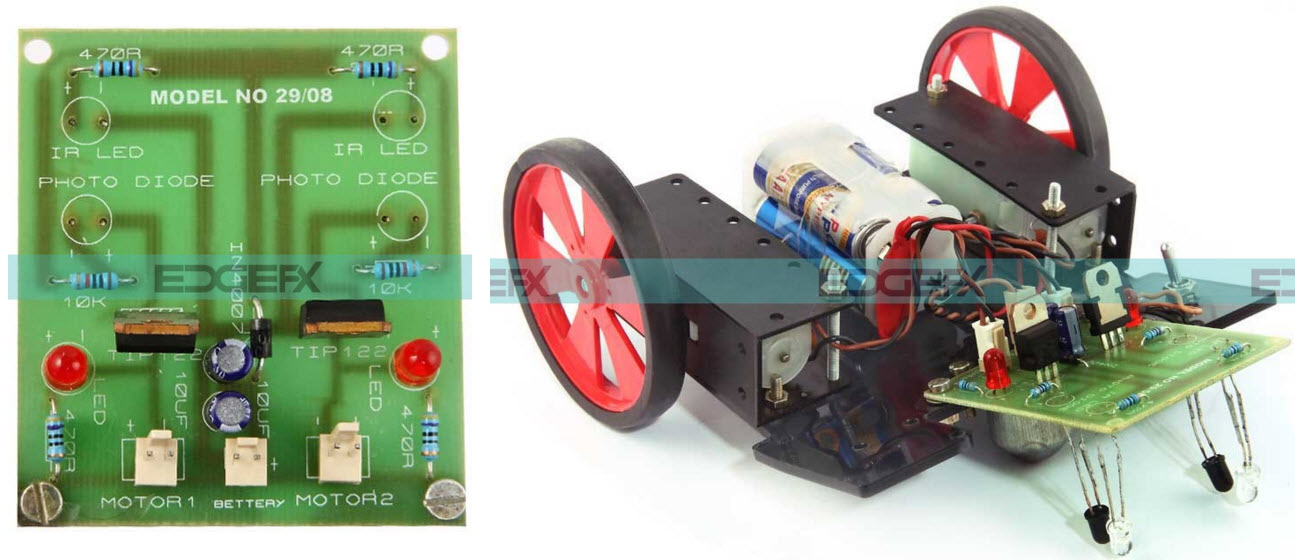
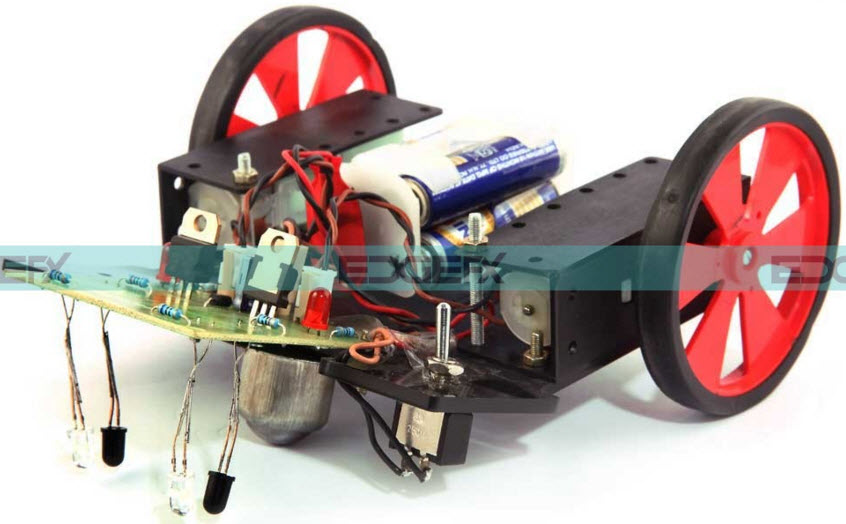
因此,在分析电路设计后,根据PCB上的电路图组装组件。然后,按照正确的焊接指南,使用焊枪和焊丝焊接电路。如上图所示,正确连接机器人的所有零件,形成直线跟随机器人,并根据需要粘合机器人车辆的零件。
第4步:直线跟随机器人的工作
红外发射器和光电二极管用作光电传感器对,可用于检测直线跟随机器人在行走和攀爬墙壁时的指定运动路径。光电传感器对提供适当的信号来切换晶体管,以驱动直线跟随机器人的电机。
步骤5:带行走和攀爬机构的直线跟随机器人车辆
有许多面向工程专业学生的机器人项目,其中带有行走和攀爬机构的直线跟随机器人是一个创新而有趣的项目,可以使用我们的免费电子书自行设计电子项目。
机器人在我们日常生活中的应用正在迅速增加,包括移动或提升重型产品的工业应用、通过特定路径在有限区域内运输、加工、焊接、家用电器、自主机器人、用于减少人类参与和危险的军用机器人,用于与人类交互以执行多项任务的协作机器人、教育机器人、移动机器人和类人机器人。
你对自己设计电子项目感兴趣吗?你知道如何开发人形机器人吗?如果你想了解更多关于工科学生机器人项目的信息,那么你可以在下面的评论部分发布你的疑问、评论、想法和建议,以获得任何技术帮助。