
TB6600HG_关于PWM斩波调速
TB6600HG是PWM斩波型单芯片双极正弦微步步进马达驱动器,由东芝半导体和存储(Toshiba Semiconductor and Storage)制造
TB6600HG器件介绍
TB6600HG是PWM斩波型单芯片双极正弦微步步进马达驱动器,由东芝半导体和存储(Toshiba Semiconductor and Storage)制造。广泛应用于打印机、多功能打印机、自动取款机、货币兑换机、监控摄像头、投影仪等消费类/工业设备。

TB6600HG器件特点
- 高性能:TB6600HG是一款PWM斩波型单芯片双极正弦微步步进马达驱动器,具有高效率、低振动的特点。
- 大功率:该芯片可提供高耐压50VDC和大电流4.5A(峰值)的输出,适用于高功率应用。
- 高细分:TB6600HG支持多种细分选择,包括1、1/2、1/4、1/8和1/16步,可实现高精度的步进电机控制。
- 自动衰减方式选择:芯片可根据工作条件自动选择衰减方式,简化了用户设置。
- 内置保护功能:TB6600HG内置温度保护和过流保护功能,有效防止芯片因过热或过流而损坏。
- 易于控制:TB6600HG通过简单的输入控制(DIR、EN、PWM、PHASE)即可实现步进电机的正向和反向旋转控制。
- 低导通电阻:双全桥MOSFET驱动结构使得TB6600HG具有低导通电阻Ron=0.4Ω的特性,降低了功耗和发热。
- 封装:TB6600HG采用HZIP25-P-1.00F封装,便于用户在电路板上布局和焊接。
引脚图及引脚介绍
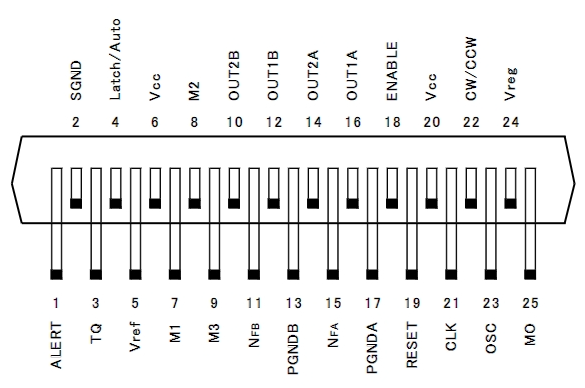
以下是TB6600HG器件的部分引脚介绍:
- ALERT:警告引脚。当驱动器检测到异常条件(如过热、过流或欠压)时,此引脚会发出警告信号。通常,这个引脚可以连接到一个LED或微控制器的中断输入,以便及时通知用户或执行相应的错误处理。
- SGND:信号地引脚。这是驱动器的信号电路的参考地,用于连接信号线和低电平电路。
- TQ:温度检测引脚。此引脚提供了一个接口,用于检测驱动器的内部温度。通过读取此引脚上的电压或电阻值,可以了解驱动器的温度状态,从而进行必要的温度控制或保护。
- LATCH/AUTO:锁定/自动模式选择引脚。通过设置此引脚的状态,可以选择驱动器的操作模式。在锁定模式下,微步设置将被锁定,而在自动模式下,驱动器将自动选择最佳的微步设置以适应电机的运行状态。
- VREF:参考电压引脚。此引脚提供了一个稳定的参考电压,用于驱动器的内部电路和微步设置。通常,此引脚需要连接到一个稳定的电源或参考电压源。
- VCC:主电源引脚。这是驱动器的主要电源输入,需要连接到一个适当的电源电压,以确保驱动器的正常运行。
- RESET:复位引脚。通过短暂地将此引脚拉低,可以将驱动器复位到其初始状态。这通常用于初始化设置或清除错误状态。
- ENABLE:使能引脚。当此引脚为高电平时,驱动器将激活并驱动步进电机。当此引脚为低电平时,驱动器将停止驱动电机,但仍保持其内部设置和状态。
- CLK:时钟输入引脚。这是驱动器的时钟输入,用于控制步进电机的旋转速度和方向。通常,此引脚需要连接到一个时钟信号源,如微控制器的输出引脚。
- OSC:振荡器引脚。此引脚用于连接一个外部振荡器或时钟源,以提供驱动器的时钟信号。如果不使用外部振荡器,驱动器内部将使用一个默认的振荡器来生成时钟信号。
原理图及工作原理

TB6600HG器件的工作原理基于PWM(脉冲宽度调制)斩波控制技术,用于驱动两相双极步进电机。它采用单芯片设计,内部集成了微步控制逻辑、功率放大电路、保护电路等功能模块。
当TB6600HG接收到来自微控制器或其他控制设备的控制信号时,它会根据信号的要求产生相应的PWM波形,以控制步进电机的旋转速度、方向和微步数。控制信号通常包括时钟信号(CLK)、方向信号(DIR)和使能信号(EN)。
时钟信号(CLK)决定了步进电机的旋转速度。通过改变时钟信号的频率,可以控制电机的转速。方向信号(DIR)用于控制电机的旋转方向,当方向信号为高电平时,电机正转;当方向信号为低电平时,电机反转。使能信号(EN)用于控制电机的启停,当使能信号为高电平时,电机开始旋转;当使能信号为低电平时,电机停止旋转。
TB6600HG内部的功率放大电路将控制信号转换为适合驱动步进电机的电流和电压。通过调节PWM波形的占空比,可以控制电机的输出力矩和旋转精度。此外,TB6600HG还支持多种细分模式,通过选择不同的细分系数,可以实现更高的旋转精度和平稳性。
在工作过程中,TB6600HG还会监测电机的运行状态和外部环境,如温度、电流和电压等。如果发现异常情况(如过热、过流或欠压),驱动器会采取相应的保护措施,如降低输出电流、停止驱动或发出警告信号,以保护步进电机和驱动器本身免受损坏。
封装图
TB6600HG器件的封装为HZIP-25。封装图如下所示:

TB6600HG的PWM斩波调速如何实现?
TB6600HG器件通过PWM斩波技术实现步进电机的速度调节。PWM斩波调速的基本原理是通过改变脉冲宽度调制信号(PWM信号)的占空比,从而改变步进电机电枢电压的平均值,进而控制电机的转速。
在TB6600HG中,PWM信号的占空比可以通过对PWM输入引脚施加适当的脉冲信号来调整。具体来说,用户可以通过改变脉冲信号的宽度(即高电平持续时间)来改变PWM信号的占空比。当PWM信号的占空比增加时,步进电机电枢电压的平均值也随之增加,电机转速相应提高;反之,当PWM信号的占空比减小时,电机转速降低。