
安盛美(onsemi)_LM358DR2G器件介绍_规格参数_优缺点_引脚_原理_封装_应用
ON Semiconductor的 LM358DR2G是一款双路运算放大器,具有真正差分输入,可在3 V和32 V之间的电源电压下操作。共模输入范围包括负电源,在很多应用中无需外部偏压组件
LM358DR2G器件介绍
ON Semiconductor的 LM358DR2G是一款双路运算放大器,具有真正差分输入,可在3 V和32 V之间的电源电压下操作。共模输入范围包括负电源,在很多应用中无需外部偏压组件。输出电压范围还包括负电源电压。该器件具有短路保护输出、低输入偏置电流、内部补偿、工业标准引脚和输入ESD钳等特点。
LM358DR2G的外形尺寸为5 mm x 4 mm x 1.5 mm,封装为SOIC-8,最大工作温度为+70℃,最小工作温度为0℃,每个通道的输出电流为40mA,每个通道的供电电流为1.2mA。可广泛用于各种模拟运算器,有源滤波器,波形发生器,数据放大器等大量使用运放的场合。
规格参数
- 电源电压:3V至32V
- 输出电流:40 mA
- 供电电流1.5 mA
- 电路数:2
- 增益频宽积:1 MHz
- 输入补偿电压:2 mV
- 输入偏置电流:45 nA
- 工作温度(Max):70 ℃
- 工作温度(Min):0 ℃
- 安装方式:Surface Mount
- 引脚数:8
- 封装:SOIC-8
LM358DR2G器件的优缺点
优点:
- 具有增益高、共模抑制比高等特点。
- 能在3V到32V的单电源电压范围内工作,也可在双电源条件下独立工作,并且具有内部频率补偿。
- 具有连续输出短路持续时间,可在需要快速断开的情况下保护负载。
缺点:
- 工作温度有限,在一些高温环境下可能不适用。
- 输出电压范围较小。
- 噪声较大。
引脚图及引脚介绍
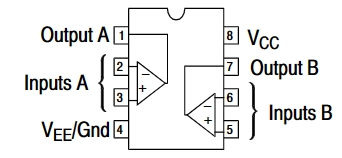
以下是LM358DR2G器件的8个引脚的详细介绍:
- 2个INPUTSA(引脚1):这是第一个运算放大器的同相输入端。
- 2个INPUTSB(引脚2):这是第二个运算放大器的同相输入端。
- OUTPUTA(引脚3):这是第一个运算放大器的输出端。
- OUTPUTB(引脚4):这是第二个运算放大器的输出端。
- VEE(引脚5):这是器件的负电源引脚。
- VCC(引脚6):这是器件的正电源引脚。
原理图及工作原理
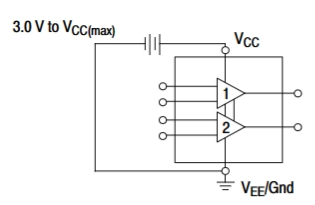
LM358DR2G双路运算放大器的工作原理如下:
- 差分输入级: LM358DR2G采用真正的差分输入级,两个差分输入端分别连接到器件的两个输入端A和B。在差分输入模式下,LM358DR2G的共模输入范围包括负电源电压,因此无需使用外部偏压组件。
- 非差分输入级: 除了差分输入级外,LM358DR2G还具有两个非差分输入端,分别连接到器件的两个输入端A和B。在非差分输入模式下,LM358DR2G的共模输入范围不包括负电源电压,需要使用外部偏压组件。
- 输出级: LM358DR2G有两个差分输出端和非差分输出端,分别连接到器件的两个输出端A和B。在差分输出模式下,LM358DR2G的共模输出范围包括负电源电压,因此无需使用外部偏压组件。
- 内部补偿电路: LM358DR2G采用内部补偿技术,包括两个电容CBB和CBC以及一个电阻器R1。内部补偿电路可消除由于温度变化和器件制造过程中的差异引起的放大器增益漂移。
- 短路保护电路: LM358DR2G具有短路保护电路,包括两个电阻器R1和R2。当输出端短路时,短路保护电路将防止器件或负载受损。
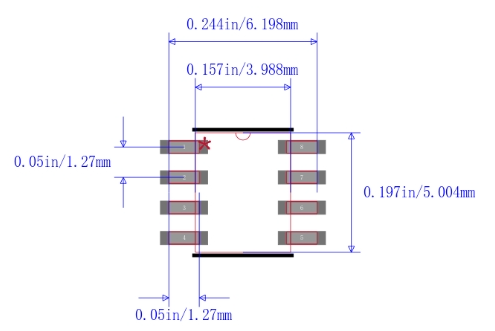
封装图
LM358DR2G器件的封装为SOIC-8。封装图如下所示:
LM358DR2G在自动驾驶中的应用有哪些?
- 传感器信号处理: 自动驾驶汽车需要通过各种传感器获取环境信息,如雷达、激光雷达、摄像头等。LM358DR2G可以用于处理这些传感器采集的信号,如距离信号、速度信号等。
- 图像处理: 自动驾驶汽车需要通过摄像头获取道路图像,并进行图像处理,以识别交通标志、障碍物等信息。LM358DR2G可以用于图像放大、滤波、比较等电路。
- 控制决策: 自动驾驶汽车需要根据传感器信息和图像处理结果做出决策,如转向、刹车等。LM358DR2G可以用于比较不同传感器的信息,并做出相应的控制决策。
- 数据记录: 自动驾驶汽车需要记录各种数据,如车速、行驶路线等。LM358DR2G可以用于记录和处理这些数据。