
使用KK2.1飞行控制器和伺服电机的简易包裹递送无人机
据我们所知,无人机是一种无人驾驶的空中或飞行机器人,可以从基站控制或自主控制…
据我们所知,无人机是一种无人驾驶的空中或飞行机器人,可以从基站控制,也可以通过嵌入式系统中的软件控制飞行计划自主导航。它可以有车载传感器和GPS。如今,无人机正被用于许多应用,如摄影、监视、搜救、消防、交通监控、农业、天气监测、快递服务等。
今天,我们将研制一种无人机,它可以运送包裹,也可以在救援行动中从空中放下包裹。我们将使用KK 2.1版 飞行控制器截至目前,但我们也可以使用立方厘米3英寸或KK 2.1.5。在这个项目中,我们没有把重点放在无人机制造正如我们在之前的教程中已经介绍过的那样。我们将掩盖夹持器机构的构建,以及用于控制伺服的遥控器的配置。我已经包括了短期限值对于3D打印与本文一起,您可以在下载后进行3D打印。我们将使用一套1045螺旋桨作为大推力来提升机组,并需要起落架。
交付无人机所需的部件
din| 组成部分 |
数量。 |
| 四旋翼机框架450 |
1. |
| A2212 1000千伏直流 |
4. |
| ESC 30甲 |
4. |
| 飞行控制器KK2.1 |
1. |
| 伺服电机MG-90 |
2. |
| 锂宝2200毫安时11.1伏3s 30c电池 |
1. |
| 带Rx的FS-i6无线电发射机 |
1. |
| 螺旋桨1045 |
2套 |
注:我建议你多买两套螺旋桨,因为如果你是初学者,它们可能会坏。
送货无人机电路图
如果你是一个初学者,你应该知道flysky FS-i6作品如我们所知,FS-i6具有用于PWM和PPM信号的6个通道以及作为附加特征的i总线和s总线。我们将使用PWM引脚。我们将使用4个通道控制无人机,使用2个通道控制伺服系统。现在,为了控制伺服,我们将需要反转一个通道(5或6),以便两个伺服电机都可以在相反的方向上运行。其余部分调谐可以使用我们参考的教程来完成。

FS-i6变送器的附加调谐要求
首先,打开发射器,然后按照说明操作
- 长按“确定”按钮
- 再次按“OK”进入“SYSTEM”(系统)
- 导航至“接收设置”,再次按“确定”
- 现在导航到“伺服频率”
- 将其设置为78,然后设置为“OK”
- 再次返回“菜单”
- 现在转到“功能设置”
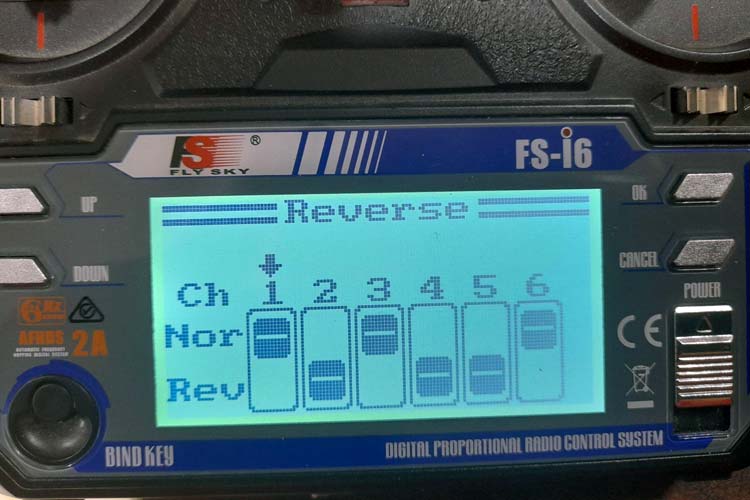
- 然后转到“反转选项”,将通道2,4,5反转(参见下图)
- 然后转到“辅助的。频道'并设置'来源'通道的5.和6.像“开关D”
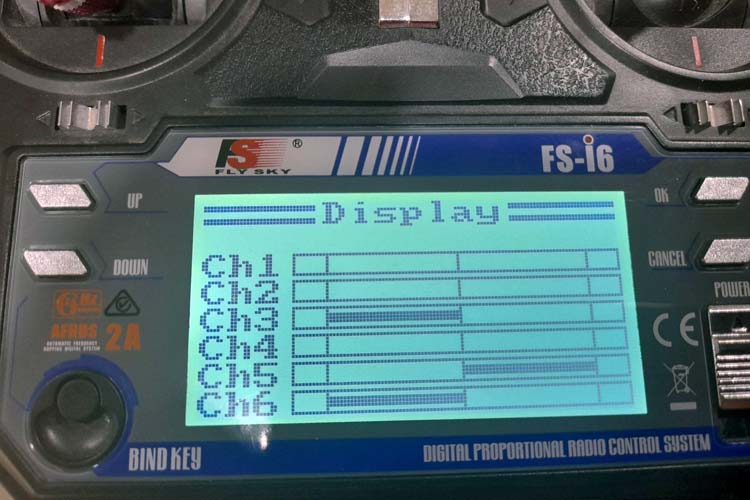
- 现在从上一个“菜单”转到“显示”。
- 你可以看到开关D正在控制第5章和第6章酒吧
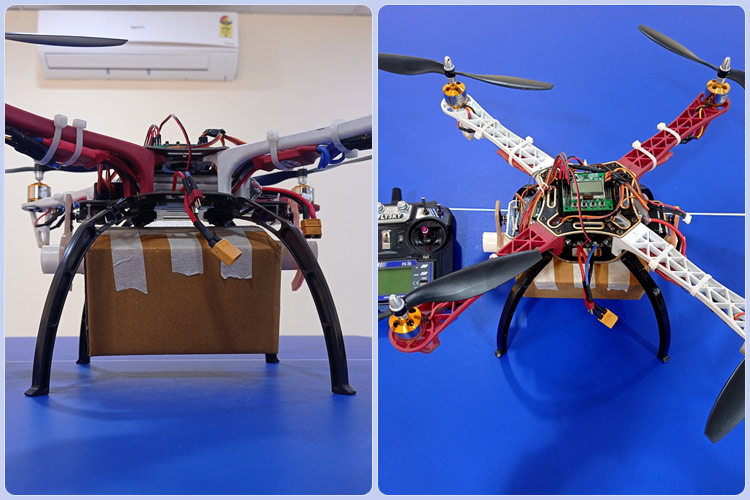
使用2台MG-90伺服电机的交付无人机
我们将制造一架配备2台MG-90伺服电机的送货无人机。所以我们开始吧。
无人机握把
我更喜欢使用Tinkercad进行所有这些基本设计,所以,我使用这个在线工具为伺服系统设计了抓握喇叭。这些喇叭可以在螺丝的帮助下直接连接到伺服喇叭上。
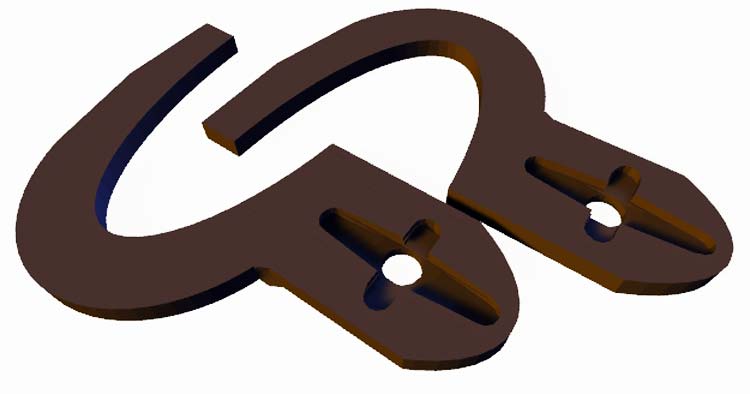
这些喇叭是为MG-90伺服电机设计的。伺服支架可以安装在夹具挂钩的空隙中,并可以用螺钉连接。我正在附加两个控制喇叭的STL文件。你可以从下载在这里.
用3D打印支架连接伺服电机喇叭
在这里,MG-90伺服电机附带的喇叭可以固定在空隙中。借助包装中提供的螺钉将其固定。它看起来如下。

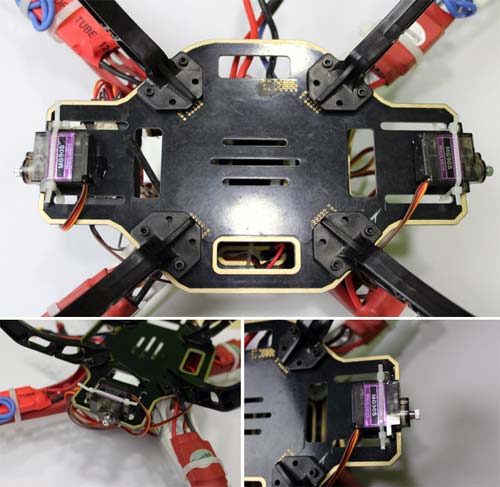
在无人机上安装伺服电机
现在,两个伺服电机将连接在无人机的底部,彼此面对。请记住,每个伺服电机都将以对称的方式连接,这样无人机的平衡就不会受到影响。现在我正在使用中型扎带来系紧电机。
为送货无人机建造箱子
我为抓取机构定制了一个纸板箱。你可以用自己的创意方式来设计它。你可以看到,我已经水平地连接了一个杆,这样它就可以被无人机支架的钩子固定住。

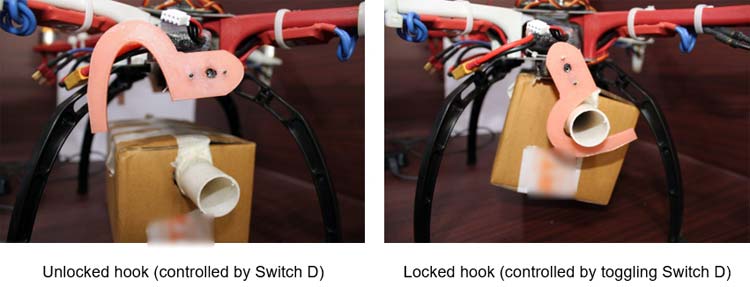
将支架连接到伺服电机上
要以正确的方式连接,您必须打开无人机和发射机的电源。通过这样做,两个伺服电机都处于空档位置。现在,通过切换变送器的开关D来检查伺服系统是否受到控制。现在,我们将用提供的螺钉将3D打印的支架连接到伺服电机上。
注:您必须同步支架的移动,通过切换开关D,必须锁定或解锁抓钩。
应用
我们知道无人机是用来将包裹从一个地方转移到另一个地方的,并且已经在无人机投送的应用在我们的网站上。
交付无人机测试
我们已经用白色瓷砖标记了交货地点。我们将尝试将无人机降落在瓷砖上,并将包裹留在那里。然后我们将再次飞往发射场。
降落在救援区
现在,我们将尝试从天上把包裹放在给定的网站上。通过这样做,我们将试图模仿空中包裹降落在救援区的情况。现在,无人机将飞往救援现场,然后放下装有医疗和必需品的包裹。
结论
现在,我们已经建立了自己的送货无人机,可以在飞行过程中以及在某个标记点上投递包裹。由于我们没有使用任何GPS或昂贵的飞行控制器,这就是为什么我们必须手动控制无人机,这需要更多的练习。我希望你喜欢这个项目。如果您有任何疑问,请随时在评论区或我们的论坛.