
什么是电流源逆变器:工作原理及其应用
逆变器用于将功率从直流转换为交流。电压源逆变器(VSI)和电流源逆变器(CSI)是两种类型的逆变器,电压源逆变器和电流源逆变的主要区别在于。。。
逆变器用于将功率从直流转换为交流。电压源逆变器(VSI)和电流源逆变器(CSI)是两种类型的逆变器,电压源逆变器和电流源逆变的主要区别在于VSI中的输出电压恒定,CSI中的输入电流恒定。CSI是一种向输入端提供交流电的恒流源,它也被称为负载电流恒定的直流链路转换器。本文讨论了电流源逆变器。
什么是电流源逆变器?
电流源逆变器也被称为电流馈送逆变器,它将输入的直流电转换为交流电,其输出可以是三相或单相。根据电流源的定义,理想的电流源是电流恒定且与电压无关的电流源。
电流源逆变器控制
电压源与大值的电感(L<sub>d)并将该电路命名为电流源。电流源逆变器供电的感应电动机驱动器的电路图如下图所示。
电路由六个二极管(D1.D2.D3.D4.D5.D6.),六个电容器(C1.C2.C3.C4.C5.C6.),六个晶闸管(T1.T2.T3.T4.T5.T6.)它们以60的相位差固定0逆变器输出连接到感应电动机。对于给定的速度,通过改变直流链路电流I来控制转矩d并且该电流可以通过改变V来改变d在相同滞后中两个开关的导通不会由于电感L的大值的存在而导致电流的突然上升d.
电流源逆变器馈电电感器电机驱动的配置取决于电源,如下图所示。
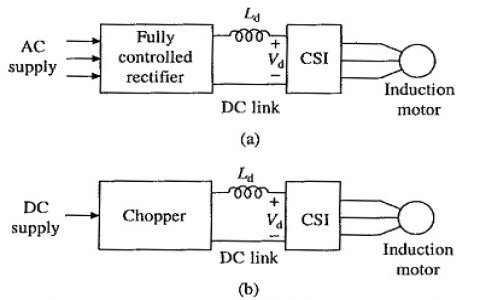
当直流电源可用时,斩波器用于改变电流。当交流电源可用时,使用完全控制的整流器来改变输出电流。
带再生Barking的闭环滑差控制CSI驱动器
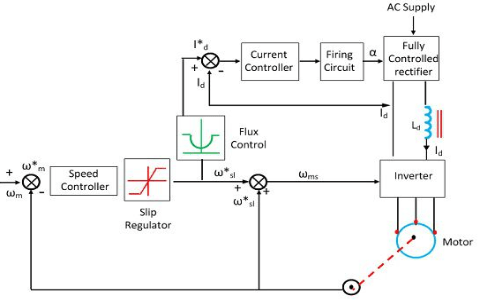
电机的参考速度误差(∆ω米)被提供给通常是VI控制器的速度控制器,并且VI控制器的输出是提供给调节速度所需的滑动调节器的滑动速度。滑差速度被提供给磁通控制,其输出是参考电流Id*必须加以控制。滑动速度(ω太太)以及实际速度(ω米)相加后会得到同步速度,从同步速度中我们可以确定频率。
频率命令被提供给CSI,因为逆变器非常能够控制频率。我们可以通过改变输入电流来控制CSI的输出。参考电流(Id*)和实际电流(Id)相加,将得到电流的误差(∆Id). 电流的误差被提供给控制直流链路电流的电流控制器,根据直流链路电流,我们可以控制α,这个α将决定电压,根据这个电压,你可以确定电流将改变多少。这是带有再生制动的闭环滑差控制CSI驱动器。这是带有再生制动的闭环滑差控制CSI驱动器的操作,其电路图如下图所示。
CSI馈电驱动的主要优点是,它比电压源逆变器馈电驱动更可靠,缺点是,它的速度范围较低,动态响应较慢,驱动总是闭环运行,不适合多电机驱动。
带R负载的电流源逆变器
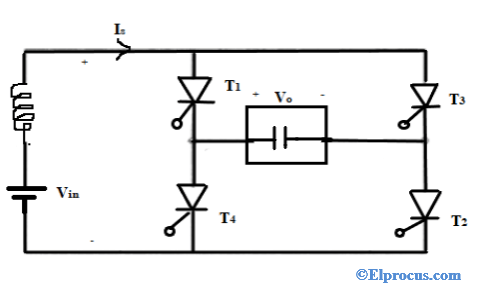
带R负载的电流源逆变器的电路图如下图所示。
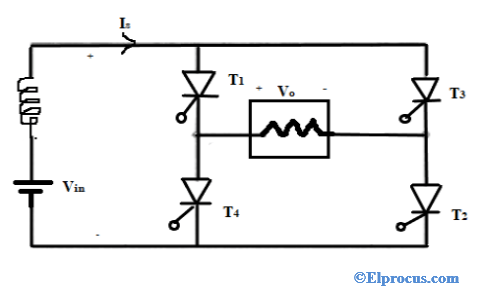
该电路由四个晶闸管开关(T1.T2.T3.T4.),我S是恒定的输入源电流,你可以看到没有任何反并联二极管连接。恒定电流是通过连接具有大电感的串联电压源来提供的。我们知道电感的性质,它不允许电流突然变化,所以当我们连接具有大电感的电压源时,它两端产生的电流肯定是恒定的。具有电阻负载的电流源逆变器的基本耗散因子等于1。
带R负载的电流源逆变器的参数
如果我们触发T1.和T2.从0到T/2,则输出电流和输出电压表示为
我0=我S>0
五、0=我0R
如果我们触发T3.和T4.从T/2到T,则输出电流和输出电压表示为
我0=-IS>0
五、0=我0R<0
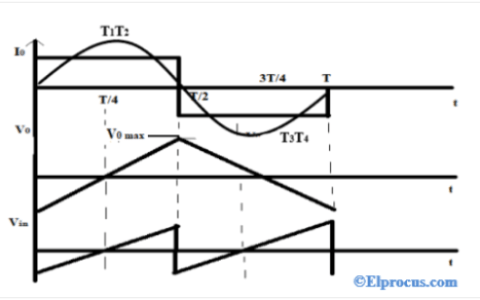
带R负载的电流源逆变器的输出波形如下图所示
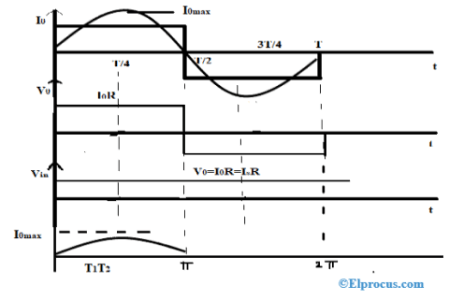
在电阻负载的情况下,需要强制换向。从0到T/2,T1.和T2.导通并且从T/2到T,T3.&吨4.正在进行。因此,每个开关的导通角将等于ᴨ 并且每个开关的导通时间将等于T/2。
电阻负载的输入电压表示为
五、在里面=伏0(从0到T/2)
五、在里面=-伏0(从T/2到T)
CSI电阻负载的RMS输出电流和RMS输出电压表示为
我0(均方根)=我S
五、0(均方根)=我0(均方根)R
具有电阻负载的CSI的平均和RMS晶闸管电流为
我T(平均值)=我S/2
我T(均方根)=我S/√2
具有电阻负载的CSI的输出电流和输出电压的傅立叶级数为
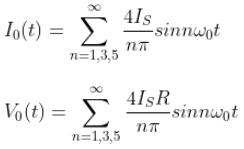
RMS输出电流的基本分量为
我01(均方根)=2√2/ᴨ * 我S
带R负载的电流源逆变器的失真系数为
g=2√2/ᴨ
总谐波失真表示为
THD=48.43%
晶闸管平均电流和均方根电流的基本分量为
我T01(平均值)=我01(最大值)/ ᴨ
我T01(均方根)=我01(最大值)/ 2
负载上的基本功率表示为
五、01(均方根)*我01(均方根)*余弦1.
负载上的总功率表示为
我0(均方根)2.R=伏0(均方根)2./对
输入电压V在里面总是正的,因为功率总是从电源输送到负载。
带电容性负载或C型负载的电流源逆变器
电流源逆变器电容负载的电路图如下图所示
在从o到T/2的波形中,T1.和T2.被触发,输出电流为I0=我S类似地,从T/2到T,T3.和T4.被触发,输出电流为I0=-IS.所以负载电流波形并不取决于负载。具有C负载的CSI逆变器的输出波形如下图所示。
输出电流波形的积分将给出输出电压。如果输出电流是交流电,那么输出电压肯定是交流电。在电路图中,采用纯电容性负载,因此电流比电压领先900
我0=我C=C dV0/数据传输时间
五、0(t) =1/CŞIC(t) dt=1/CŞI0数据传输时间
C型负载的输入电压为
五、在里面=伏0(从0到T/2)
五、在里面=-伏0(从T/2到T)
当T1.和T2.正在从0传导到π和何时T3.和T4.从π传导到3π/2,则默认情况下T1.和T2.由于正电压负载而进入反向偏置,这意味着在这种情况下,自然换向或负载换向是可能的,意味着我们不需要放置外部电路或外部换向电路来关闭晶闸管t1.和T2.当自然换向成为可能时,我们需要找到电路关断时间。电路关断时间表示为
ω0吨c=ᴨ/2.
吨c=ᴨ/2 ω0
C型负载电流源逆变器的参数
晶闸管平均电流和均方根电流表示为
我T(平均值)=我S/2
我T(均方根)=我S/√2
电容性负载的输出电流和输出电压的傅立叶级数为
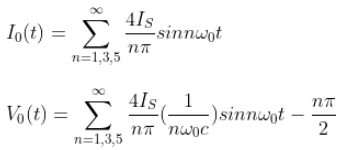
具有C负载的CSI的基本耗散因子等于零。
输出功率的基本分量表示为
P01=伏01(均方根)我01(均方根)余弦1.=0
晶闸管平均电流和均方根电流的基本分量为
我T01(平均值)=我01(最大值)/ ᴨ 和我T01(均方根)=我01(最大值)/ 2
最大输出电压为
五、0(最大值)=我S吨/4C
输入电压的RMS值为
五、单位(RMS)=伏o(最大值)/ √3
这些是具有电容性负载的电流源逆变器的参数。
应用
电流源逆变器的应用有
- 不间断电源装置
- 低温等离子体发生器
- 交流电机驱动
- 开关设备
- 泵和风扇用感应电动机
优势
电流源逆变器的优点是
- 不需要反馈二极管
- 通勤很简单
缺点
电流源逆变器的缺点是
- 它需要一个额外的转换器级
- 在轻负载情况下,它存在稳定性问题和性能迟缓
因此,这一切都是关于电流源逆变器、电流源逆变器控制、带再生制动的闭环滑差控制CSI驱动、带R负载的电流源逆变器的概述,并讨论了应用、优点和缺点。这里,有一个问题要问你,电流源逆变器的工作原理是什么?