
德州仪器 (Texas)_DRV8825PWPR介绍_规格参数_优缺点_引脚_原理_封装_应用案例
DRV8825PWPR是一款由TI(德州仪器)推出的电机驱动器芯片,主要用于步进电机控制应用。该器件集成了双极步进电机驱动器,具有两个H-桥驱动器和一个微步进计数器
DRV8825PWPR器件介绍
DRV8825PWPR是一款由TI(德州仪器)推出的电机驱动器芯片,主要用于步进电机控制应用。该器件集成了双极步进电机驱动器,具有两个H-桥驱动器和一个微步进计数器。它可驱动Bipolar步进电机,输出驱动器块由N通道功率MOSFET构成完整的H桥来驱动电机绕组。
DRV8825PWPR每个输出端可驱动高达2.5A的电流(在24V和25°C下,适当的散热器使用)。此外,该器件还具有PWM微步进电机驱动器内置微步进计数器等功能。在打印机、扫描仪和其他自动化设备应用中,DRV8825PWPR提供了一体化电机驱动器解决方案。
规格参数
- 电源电压:8.2 V至45V
- 输出电流:2.5 A
- 工作温度(Max):85 ℃
- 工作温度(Min):-40 ℃
- 安装方式:Surface Mount
- 引脚数:28
- 封装:HTSSOP-28
DRV8825PWPR器件的优缺点
优点:
- 每个输出端可驱动高达2.5A的电流,适合驱动Bipolar步进电机。
- 集成度高,是一款一体化电机驱动器解决方案,具有PWM微步进电机驱动器内置微步进计数器等功能。
- 采用4位数字控制信号输入,易于控制。
缺点:
- 由于是一款高端电机驱动器芯片,成本相对较高。
- 驱动方式有限。
- 控制信号输入限制,对于某些复杂的控制应用可能不够灵活。
引脚图及引脚介绍
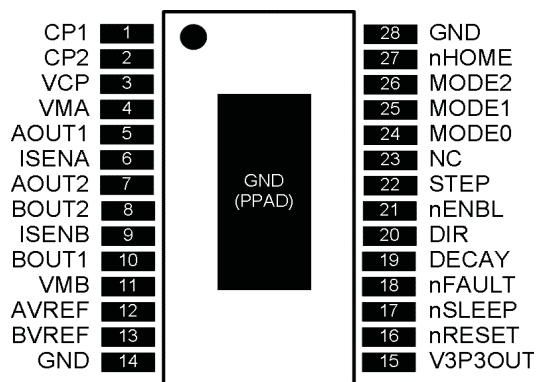
以下是DRV8825PWPR器件的20个引脚的详细介绍:
- MODE0、MODE1、MODE2:这三个引脚用于选择电机模式。MODE0和MODE1用于选择电机的相数(2、4、6、8),MODE2用于选择电机类型(混合式或双极式)。
- 2个GND:两个接地引脚,为驱动器提供接地参考。
- CP1、CP2:这两个引脚是时钟输入引脚,用于接收来自控制器的时钟信号,以控制电机的旋转速度和方向。
- VCP:这个引脚是电流控制引脚,用于控制电机绕组的电流大小,从而实现电机的力矩控制。
- CMA:这个引脚是电流检测引脚,用于检测电机绕组的电流大小,并将检测到的电流值传递给控制器。
- AOUT1、AOUT2:这两个引脚是模拟输出引脚,用于将控制器的控制信号输出到电机驱动器。
- BOUT1、BOUT2:这两个引脚是模拟输出引脚,用于将控制器的控制信号输出到电机驱动器。
- ISENA、ISENB:这两个引脚是电流检测使能引脚,用于控制电流检测的开启和关闭。
- VMB:这个引脚是电机使能引脚,用于控制电机的开启和关闭。
- AVREF、BVREF:这两个引脚是模拟参考电压输入引脚,用于为模拟电路提供参考电压。
- V3P3OUT:这个引脚是3.3V输出引脚,用于为其他电路提供3.3V电压。
- nRESET:这个引脚是复位引脚,用于控制驱动器的复位操作。
- nSLEEP:这个引脚是休眠使能引脚,用于控制驱动器的休眠状态。
- nFAULT:这个引脚是故障引脚,用于指示驱动器是否存在故障。
- DECAY:这个引脚是衰减模式设置引脚,用于设置电机的衰减模式。
- DIR:这个引脚是方向控制引脚,用于控制电机的旋转方向。
- nENBL:这个引脚是使能控制引脚,用于控制驱动器的使能状态。
- STEP:这个引脚是步进脉冲输入引脚,用于接收来自控制器的步进脉冲信号,以控制电机的旋转步数和位置。
- NC:这个引脚未连接,通常不用。
- nHOME:这个引脚是原点检测输出引脚,用于指示电机是否到达设定的原点位置。
原理图及工作原理概述
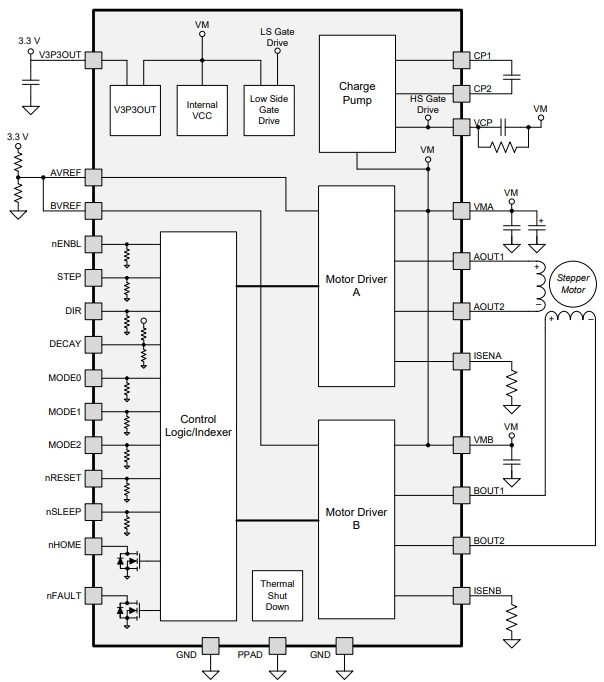
DRV8825PWPR器件的工作原理是通过调整控制输入信号的占空比来控制电机的转速和方向。它采用了双H桥结构,其驱动电流采用了步进电机常用的电流控制方式,即通过调整电压下限来控制电流大小。此外,该驱动器还采用了自适应调整电流控制技术,可以根据电机负载的变化动态调整电流大小,从而实现更好的运动控制效果。
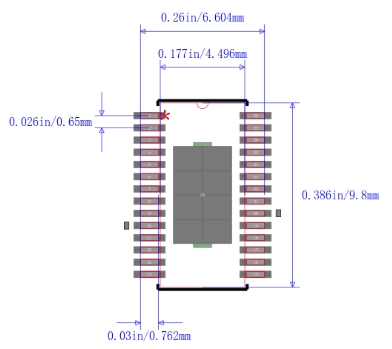
封装图
DRV8825PWPR器件的封装为HTSSOP-28。封装图如下所示:
DRV8825PWPR器件在自动化设备中的应用案例有哪些?
- 可以用于打印机、扫描仪的电机控制,例如滚筒电机、印刷电机、偏转电机等。
- 可以用于机器人的步进电机控制,例如移动、抓取、旋转等。
- 可以用于工厂自动化中的电机控制,例如生产线上的传送带电机、振动电机等。
- 可以用于游戏机上的电机控制,例如风扇电机、屏幕旋转电机等。
- 可以用于自动柜员机中的电机控制,例如钞票输送电机、硬币收集电机等。