
使用KK2.1.5飞行控制器建造自己的无人机——从选择正确的组件到首次飞行(第1部分)
四旋翼直升机是一种正在大规模使用的无人机。这些是用于救援行动的…

四旋翼直升机是一种正在大规模使用的无人机。这些无人机用于救援行动、运送、监视、防御、医疗和农业等目的。无人机的主要优点是体积小巧,易于控制。在本文中,我们将学习如何在电机、飞行控制器和底盘的帮助下,使用KK2.1.5飞行控制器设计四旋翼飞机。
什么是四旋翼机?
四旋翼无人机是一种多旋翼无人机,配有4个马达。四旋翼飞机使用电子传感器和控制系统稳定飞行。有两种类型的四旋翼直升机,即1加配置四旋翼直升机和2交叉配置四旋翼飞机。在本教程中,我们将设计一架X形的四旋翼直升机。这两种形状都很稳定,但在向前飞行时,四旋翼直升机需要在向前飞行中输入偏航控制。两种配置的偏航控制权限相同,但在交叉配置的情况下,变桨和滚转控制权限高达约30%。四旋翼飞机依靠加速度计、陀螺仪等电子传感器和控制系统来稳定飞行。
构建四旋翼机所需的组件
框架:
框架是无人机的基本结构,所有部件都安装在一起。框架应该是刚性的,这样可以最大限度地减少来自电机的振动。它由一个中心板组成,电子部件和四个臂连接在中心板上。在下面的图片中,我们可以看到四旋翼机的机身。

我们将使用宽度为450毫米的f450。它是由玻璃纤维和耐用的尼龙制成的。它有两个板,一个板带有集成PCB,所以我们可以直接焊接ESCs。F450武器得到了加强,以防止任何损坏;我们可以很容易地把马达放在手臂的边缘。我们使用的是m2.5尺寸的螺钉,它们是内六角螺钉或内六角螺丝。
电机:
我们在这里使用了无刷直流电机。直流电机由线圈和磁铁组成,用于驱动轴,轴上有一个电刷,负责切换线圈的功率方向。无刷电机没有这些电刷。它们在电机的中心有线圈,电机固定在支架上。它们包含多个磁铁,安装在外侧的圆柱体上,圆柱体连接在旋转轴上。所以,线圈是固定的。这意味着,电线可以直接连接到它们,因此不需要刷子。无刷直流电机的转速远高于直流电机(转速相同),耗电量也较小。此外,没有由于电刷过渡而造成的功率损失。如下图所示。我们可以看到1000KV无刷直流电机,它有三条输入线。我们将把这三根电线与电子速度控制器(ESC)连接起来。
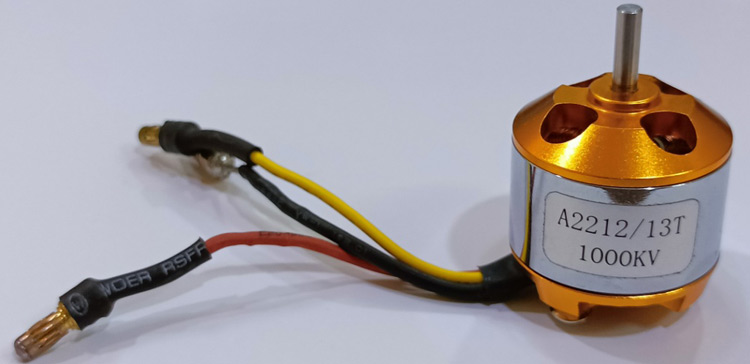
无刷电机具有额定电压Kv。这意味着,如果我们在没有任何负载的情况下给电机提供V电压,电机将以给定的RPM(每分钟转数)旋转。
转速=千伏*伏
在这里,我们使用的是四个无刷电机,额定电压为1000千伏。
螺旋桨:
螺旋桨安装在每个无刷电机的顶部。螺旋桨有多种尺寸和形状。我们使用的是(10*4.5)尺寸的螺旋桨,这意味着它的直径是10,螺距是4.5英寸。直径给出面积,但间距给出有效面积。如果我们在相同直径下使用更大螺距的螺旋桨,螺旋桨将产生更多的推力和升力,但也需要更多的动力。高转速提供了更高的速度和机动性,但提升的重量更少。

如果我们想让无人机在有重物的情况下稳定飞行,那么我们应该使用这种电机,它可以减少转数,但提供更多的扭矩,应该使用大螺距螺旋桨。要飞行四旋翼直升机,我们需要1:2的重量和推力比。
功率(瓦)=Kp*D4.*P*转/分3.
哪里
Kp=对于中型螺旋桨,Kp值为1.2
D=螺旋桨直径
P=变桨
螺旋桨的位置在无人机的飞行中起着重要作用。我们需要注意螺旋桨的形状,因为螺旋桨看起来可能相同,但实际上并不相同,它们可能是彼此的镜像,就像我们的手是彼此的镜子,但它们并不相同。

在上图中,螺旋桨看起来是一样的,但都不同,都是彼此的镜像。螺旋桨应该这样旋转,以便向下吸入空气,因为这会导致无人机向上飞行。如果螺旋桨向上推动空气,那么无人机就会被推向地面。我们应该放置螺旋桨,使其向下吸入空气。螺旋桨的平面应朝向电机的旋转方向。如果电机按时钟方向旋转,则平面应在前面。
电子速度控制器
无刷电机是三相电机,因此不能使用直流电源运行。电子稳定控制系统产生三个频率信号,相位不同但可连续控制,以保持电机转动。它有一个电池输入和电机的三相输出。我们在这里使用的是30Amp ECS。在下图中,我们可以看到ESC的外观。我们将为四种不同的电机使用四个ESC。

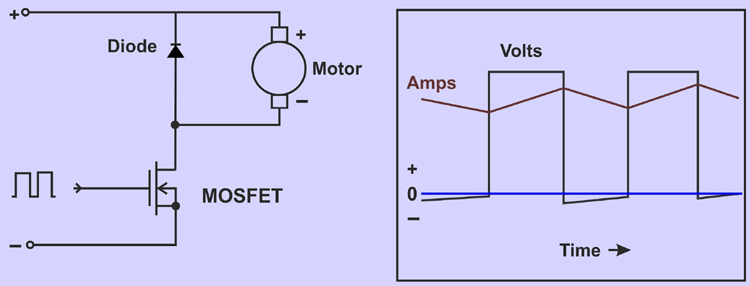
控制器通过脉宽调制(PWM)每秒连接和断开与电机的连接约2000次。MOSFET晶体管用作开关,而不是机械开关。开关速度很快,电机无法检测到。如果连接了24V电池,只有一半的时间,电机会看到电池电压为12V,并以一半的速度运行。开关速度也会影响电机电感,从而使电机电流保持恒定流动。然而,电流从电池流出的时间只有一半,因此电池电流将是电机电流的一半。在下图中,我们可以看到ESC的内部电路图及其电流(安培)随时间的响应。
电池
锂聚合物(LiPo)电池因其重量轻、额定电流高而常用于四旋翼飞机。在这里,我们使用了3节LiPo电池。LiPo电池的单电池可以提供高达3.6伏的电压。
LiPo电池容量为2200mAh,电压为11V(3个电池),放电速率为30C。在下面的图片中,我们可以看到2200毫安时的LiPo电池。这是2200毫安时锂离子电池的图片。

LiPo电池有两个特性参数:
1-容量-它告诉电池中存储了多少能量。
2-放电速率——也称为C速率,以C单位表示。它表示电池可以放电的速率。最大电流(I<sub>最大值)可以从电池中汲取的能量是放电速率和容量的乘积。
我最大值=电池容量*放电速率
我们正在使用一种放电速率为30摄氏度的电池。
所以,我最大值=2200毫安时*30摄氏度=66安培
这意味着2200mAh 30C 3S LiPo可以提供高达66安培的最大电流。
发射器和接收器:
变送器作为用户的控制器工作。用户只能使用此发射机操作四旋翼直升机。它基于无线电通信。接收器连接在无人机上,接收器有天线,在天线的帮助下,它与发射器通信。这是一种完全无线的通信。发射机向接收机发送信号,接收机将该信号发送给飞行控制器。我们在这里使用FLYSKY发射机和接收机。这个发射器的射程为1500米,但如果我们在磁干扰高的地方使用这个发射器,那么发射器的射程就会减小。你可以看到您需要了解的关于FLYSKY FS-i6发射器和接收器的一切,用于轻松无人机控制文章来了解这个发射机和接收机的所有功能。

KK2.1.5飞行控制器
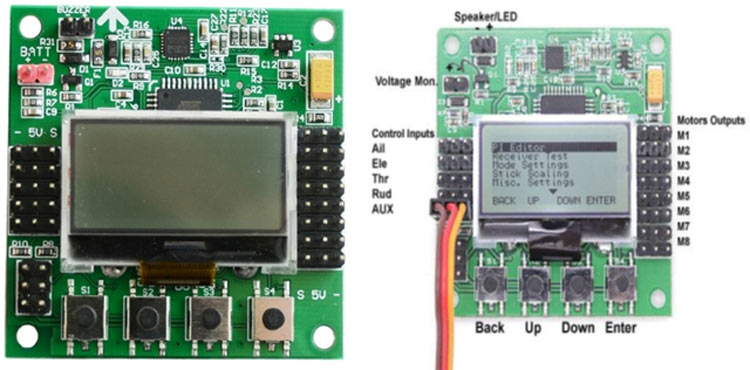
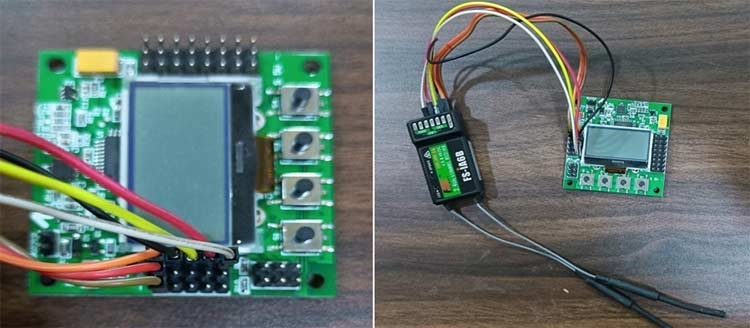
KK2.1.5是飞行控制器;飞行控制器也被称为无人机的大脑,因为无人机的所有操作都受到控制。KK2.1.5内置ATMEL mega 664PA IC。它是一款基于8位AVR RISC的微控制器,具有64k内存。它内置加速度计和陀螺仪,6050 MPU和自动调平功能。它在板的右侧有八个电机输出,我们在这里连接ESC。它有5个控制输入;这些输入通过接收器连接。它在中间还有一个LCD显示屏,将用作无人机的用户界面。其工作电压为1.8V至5.5V,输入电压为4.8-6.0 V。
Kk2.1.5用于在飞行过程中稳定四旋翼机,为此,它接收来自陀螺仪的信号(滚转、俯仰和偏航),并将这些信号发送到处理器(ATMEL mega 664PA),然后将控制信号传递给电子稳定系统,这些信号的组合指示电子稳定系统对电机转速进行微调,从而稳定飞行器。Kk2.1.5还使用来自接收器的信号,并通过副翼、升降舵、油门和方向舵用户需求输入将这些所有信号一起传递给处理器(ATMELmega664PA)。处理后,这些信息被发送到ESC,ESC依次调整每个电机的转速,以控制飞行方向(偏航、向右、向左、向上、向下、向后、向前)。在下面的视频中,我们已经逐一解释了上述所有组件。
四连杆飞行器的飞行控制力学
四旋翼直升机的运动是通过改变4个电机中每个电机的相对推力来控制的。在这里,我们使用的是X形状的四旋翼直升机。在这种四旋翼直升机中,位于同一对角线上的电机沿同一方向移动,无论是顺时针方向(CW)还是逆时针方向(CCW)。如果我们要开车,那么我们可以向前、向后、向左或向右,但当我们谈论飞行系统时,我们不会这么说。飞行系统有不同的术语,即偏航、滚转和俯仰。
在了解四旋翼直升机的飞行动力学之前,我们需要了解四旋翼飞机角运动的三个主要参数,即偏航、滚转和俯仰。
滚动:
从无人机后面延伸到无人机前面的轴称为角色轴,围绕该轴的旋转称为角色运动。这种运动也被称为副翼。在下面给出的图像中,我们可以看到滚转运动。

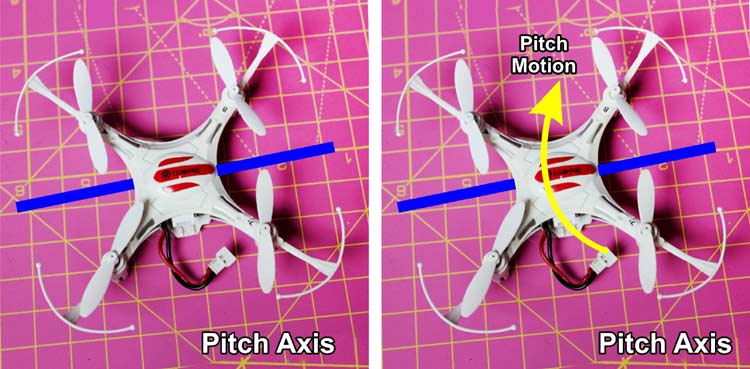
间距:
从无人机的左侧延伸到无人机的右侧的轴称为俯仰轴。围绕这个轴的旋转称为俯仰运动。它也被称为电梯运动。在下面的图片中,我们可以看到球场的运动。
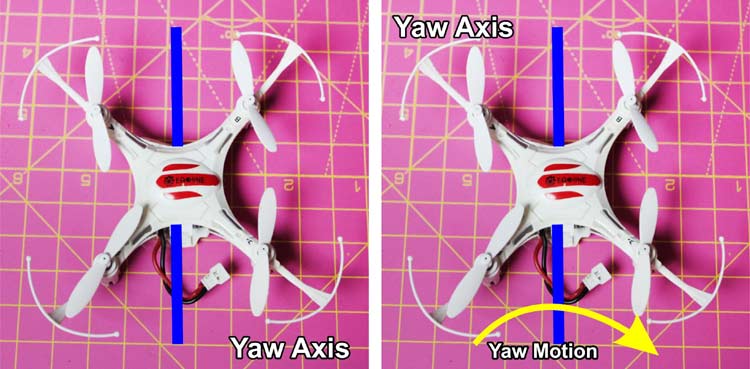
偏航:
从无人机顶部向无人机底部延伸的轴称为偏航轴。围绕这个轴的旋转称为偏航运动。它也被称为舵。在下面的图片中,我们可以看到偏航运动。
借助下面给出的图像,我们可以一起理解这三种运动。
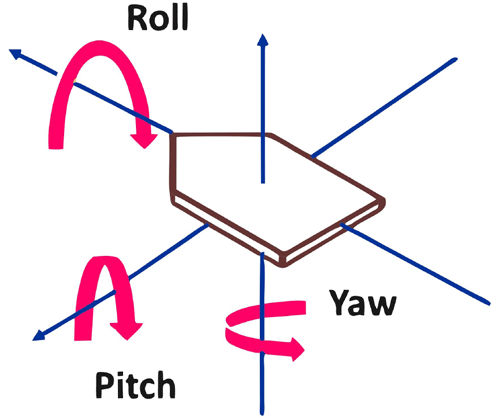
这些不是横向运动本身,而是沿着三个不同轴的旋转。甚至横向运动也是沿着这些轴旋转的结果。要了解无人机的控制,我们首先需要了解作用在无人机上的不同力量。如果推力=重量(mg),那么四旋翼直升机将保持平衡。如果推力>重量(mg),则无人机将向上,如果推力<重量(mg。
当向上移动时,推力的方向就是无人机的运动方向,所以要改变无人机运动的方向,我们需要改变推力的方向,这就是无人机运动背后的逻辑。
向前和向后运动:
如果我们想让无人机向前移动,我们需要产生向前的推力分量。这是通过增加稀有电机的功率和减少前电机的功率来实现的。如果我们想让无人机向后移动,我们会降低稀有电机的功率,增加前置电机的功率。
左右方向的运动:
为了将无人机向左移动,我们生成向左方向的推力分量。这是通过增加右马达的功率和减少左马达的功率来实现的。为了将无人机向右移动,我们增加了左电机的功率,减少了右电机的功率。
四连杆的偏航运动:
对于偏航运动,事情可能会变得有点棘手,当我们想使无人机沿顺时针方向偏航时,我们会增加逆时针方向螺旋桨的功率,由此产生的反作用扭矩将使无人机在顺时针方向上偏航。如果我们想使无人机沿CCW方向偏航,我们将增加顺时针方向螺旋桨的功率,由此产生的反作用扭矩将使无人机逆时针方向偏航,因此为了控制四旋翼的运动,我们控制给其电机的功率。
在下面的视频中,我们通过一架无人机样本解释了四旋翼直升机的飞行控制机制
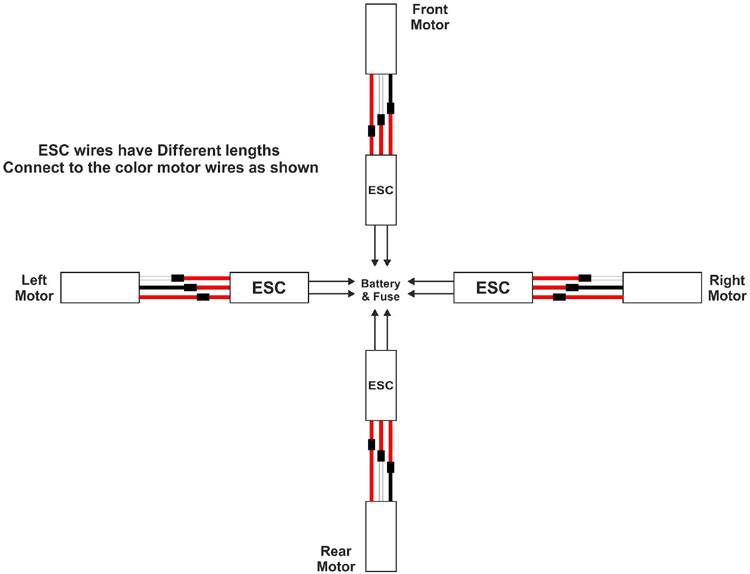
四旋翼机框图
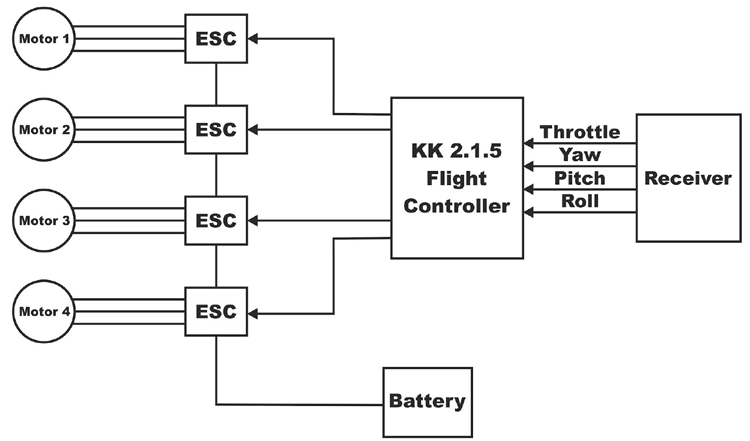
正如我们在下面的框图中看到的,所有的电机都通过ESCs与KK2.1.5相连。加速度计和陀螺仪显示在KK2.1.5板外部,但它内置在板内部。接收器直接与KK2.1.5板相连。在下面的图片中,我们展示了四旋翼直升机的框图。
四科普特的飞行动力学
要驾驶无人机,我们只有4种类型的输入。这四个输入是通过向电机提供或多或少的功率来控制的。

这里有4个电机,电机1和3沿CW方向旋转,电机2和4沿CCW方向旋转。Ꞷ1.Ꞷ2., Ꞷ3.Ꞷ4.是电动机1、电动机2、电动机3和电动机4的角速度。l是对角相对的电机之间的距离,Z轴垂直于表面。
每个电机提供Z方向的向上推力。
推力αꞶ2.推力=KꞶ2.
其中K是升力常数。
每个电机提供Z方向的向上推力。
Z方向上的力(向上方向):
Fz=K(Ꞷ1.2.+ Ꞷ2.2.+Ꞷ3.2.+ Ꞷ4.2.)
X、Y和Z方向的扭矩:
Tx=K*l*(Ꞷ4.2.- Ꞷ2.2.)吨y=K*l*(Ꞷ3.2.- Ꞷ1.2.)吨z=B*l*(Ꞷ1.2.- Ꞷ2.2.+Ꞷ3.2.- Ꞷ4.2.)
其中B为阻力常数
F呢x&如果y?
在四旋翼直升机中,我们可以完美地诱导旋转运动。我们可以在X、Y和Z方向上产生力矩,但只能在Z方向上引起力。我们不能诱导Fy和Fz直接地电机不能在X、Y方向上感应力。
如果我们想沿着X和Y方向移动四旋翼机,那么我们需要将四旋翼机绕X或Y轴旋转一个角度,然后沿着X、Y和Z轴作用一个分力。我们可以通过旋转四旋翼直升机间接地诱导X、Y方向的运动。
因此,控制四旋翼直升机有点复杂,因为我们不能直接获得在X和Y方向上的运动,我们需要首先引起旋转,然后力将在X和Y方向上作用。
我们有控制变量或四个输入
FzTxTyTz
但我们必须控制六个参数或六个输出
十、 Y,Z,θ(滚转),Փ(俯仰),ψ(偏航)
关于使用逆矩阵方法的变换,我们得到,
Ꞷ1.2.=(1/4千克)*华氏度z–(1/2千克)*吨y–(1/4b)*TzꞶ2.2.=(1/4千克)*华氏度z–(1/2千克)*吨x+(1/4 b)*TzꞶ3.2.=(1/4千克)*华氏度z+(1/2千克)*吨x–(1/4b)*TzꞶ4.2.=(1/4千克)*华氏度z+(1/2千克)*吨x+(1/4 b)*Tz
在下面的视频中,我们通过无人机样本解释了四旋翼直升机的飞行动力学。
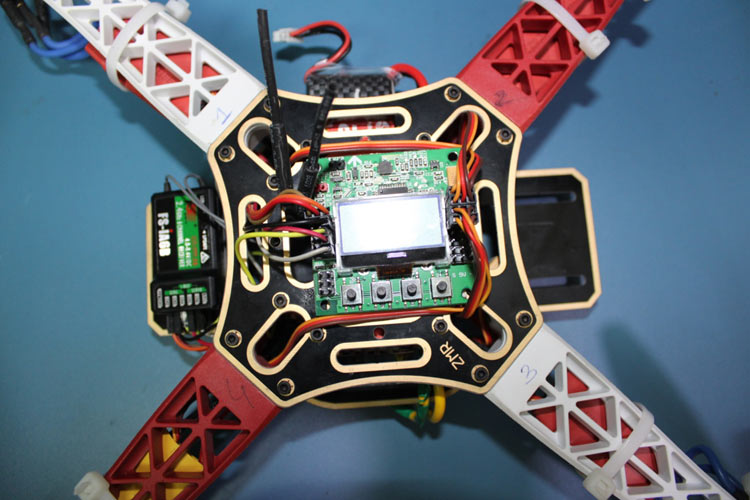
KK2.1.5飞行控制器的设置和调整
Kk2.1.5多旋翼液晶飞行控制器板建立在ATML644 PA上。板的右侧有8个输出,我们将使用四个唯一的输出直接连接ESC。我们将使用四旋翼直升机,所以我们只使用了四个输出引脚。
ESC的连接:
输出引脚每行有3个引脚。最右边的所有引脚都接地。所有中心引脚均为Vcc(5伏)。所有第一的引脚都是信号。将所有四根ESCs导线连接到KK2.1.5板的前四个输出引脚。ESCs和KK2.1.5板之间的连接应如下表所示。
ding="0" cellspacing="0" style="width:716px">| 电子稳定系统 |
KK2.1.5董事会 |
| 接地(棕色电线) |
接地(最右侧引脚 |
| Vcc(红线) |
Vcc(中心引脚) |
| 信号(黄线) |
信号(左侧引脚) |
在下图中,我们可以看到ESCs与KK2.15的连接。在这里,我们只连接了1个ECS,像这样,我们将用KK2.1.5板连接所有四个ECS。

接收器连接:
输入引脚位于液晶显示器的左侧。这里有5个连接,这些引脚将与接收器连接。接收器引脚和KK2.1.5输入引脚的连接方式如下:
| 接收器通道 |
连接线颜色 |
KK2.1.5(输入引脚) |
| 副翼(CH1) |
橙色(信号)、红色(Vcc)、绿色(接地) |
副翼(1标准时间行) |
| 电梯(CH2) |
黑色 |
电梯(2第二次行) |
| 节气门(CH3) |
黄的 |
节气门(3第三方行) |
| 方向盘(CH4) |
粉红色 |
方向舵(4第行) |
| AUX1(CH5) |
白色 |
AUX1(5第行) |
我们将用三根连接线连接接收器的第一个通道(CH1),其余通道将仅通过单线连接,因为其他通道不需要连接Vcc和接地。根据上表,接收器端连接应如下图所示。

根据上表,KK2.1.5板端连接应如下图所示。
在下面的视频中,我们已经解释了ESC和接收器与kk2.1.5飞行控制器的连接。
无刷直流电机设置:
电机一和三应逆时针方向旋转,电机二和三应反时针方向旋转。我们将使用飞天发射器设置所有电机的方向。首先将蓄电池连接到电源线连接器。我们将第一个电机ESC连接到接收器的通道3,通道3始终处于节流状态。现在,打开变送器并稍微移动节气门,然后电机将旋转。现在,观察电机的方向。如果我们看到方向相反,我们将反转电机和ESC连接的末端导线。现在,再次移动油门,我们可以看到电机正朝着所需的方向旋转。现在,对每个电机重复相同的步骤。电机和ESC都有3根电线,我们将连接电机和ESC,如下图所示。
在下面的视频中,我们已经解释了ESCs和BLDC电机的连接。
KK2.1.5设置
设置KK2.1.5板时,首先保持发射器处于开启状态,并确保接收器与发射器绑定。KK2.1.5板S1、S2、S3和S4的底部有四个按钮。使用这些按钮,我们将与液晶显示器进行交互。
第1步首先按S4进入菜单,然后进入加载电机布局,然后选择四旋翼机X模式并将四旋翼机设置为X–模式。检查此处的所有电机方向。

第2步接下来是ACC校准,为此我们必须将四旋翼飞机放置在平面上,并选择用于校准加速度计的ACC校准。点击S4,这是自动校准。
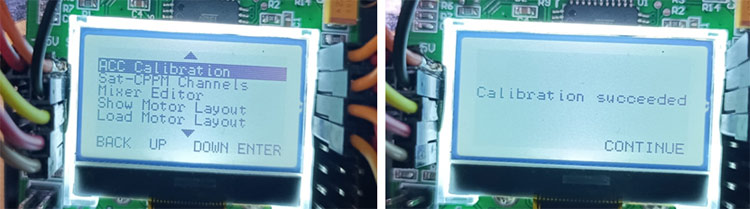
一旦Acc校准结束,我们就可以拔出电源并再次提供电源。它将在液晶显示器上显示安全,这意味着它已经从错误变为安全。

第3步现在,转到PI编辑器。在这里,我们必须设置副翼(滚转)、升降舵(俯仰)和方向舵(偏航)的P(增益/极限)和I(增益/限制)。P增益是代表敏感性和责任性的比例增益。P越高,控制力越强,P越低,控制力就越弱。

I是积分增益,表示它保持高度的能力。PI设置完成后,转到模式设置。

第4步在模式设置中,将自身电平设置为AUX。

步骤5现在转到其他设置,在这里我们将设置报警1/10伏。

要设置报警1/10伏,我们需要进行以下计算。
11.1伏的三电池LiPo电池使用每个电池3.60伏的值来表示空电池,然后将该值(以1/10为单位)设置为(3.6*3*10=108),当电源电压降至10.8伏时,警报将响起。
第6步现在,我们开始校准ESCs。首先将发射器的油门调到最小,然后将油门调到最大,继续按下S1和S4开关,然后将电池连接到四旋翼机上,现在我们将听到两声蜂鸣声,我们将把油门放下,这将导致一声蜂鸣声。这样,校准过程就结束了。
第7步要武装四旋翼直升机,将油门保持在左手边,一旦四旋翼直升机武装起来,我们就可以驾驶四旋翼直升机。
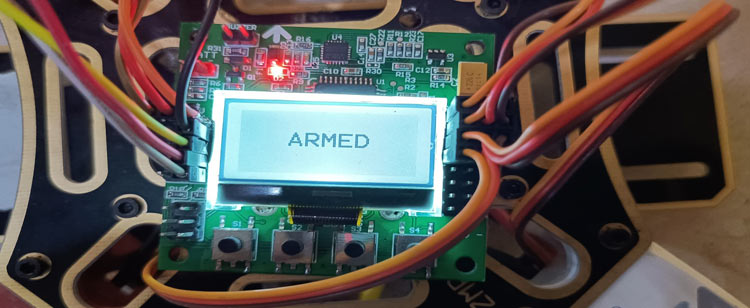
现在四旋翼直升机已经准备好飞行了。将油门保持在右侧。
在下面的视频中,我们已经逐步解释了KK2.1.5飞行控制器设置的设置。
四分频器中的PI调谐
极低P增益:
控制四旋翼机非常困难,四旋翼机缺乏整体稳定性。当飞船做出反应时,控制输入感觉不精确且缓慢。当四旋翼直升机飞行时,很容易过度纠正命令,飞行器会感到不安。
非常高的损益增益:
四旋翼飞机将受到左右振荡的影响。四旋翼直升机将很容易获得或失去高度,但很难保持给定的高度。四旋翼飞机将以低频振动。
校正P增益:
我们可以简单地操作四旋翼直升机,它将以稳定的方式飞行。它可以快速优雅地起飞,在一个地方盘旋。如果我们想让四旋翼飞机杂技般地飞行,我们应该从其稳定飞行值略微增加P设置,从其稳定的飞行值略微减少I设置;如果我们想要平缓平稳的飞行,我们应该从其稳定飞行值略微降低P设置,并从其稳定的飞行值略微增加I设置。
比例增益系数(Kp):
Kp对于相对稳定的飞行起着重要作用。Kp确定来自陀螺仪的机载控制和用户操纵杆输入之间的混合。随着Kp值的增加,四旋翼直升机将变得更加敏感,对角度变化作出反应,并可能以高频振荡。在降低Kp值时,四旋翼直升机将表现迟钝,难以保持稳定。
积分增益系数(Kc)
Kc增加了角度位置的精度。例如,当飞行器受到风的干扰,其角位置改变了10度时,理论上它会记住角度改变了多少,并试图返回10度。它适用于不规则的风和来自电机的湍流。当Kc值将高时,则四旋翼直升机将开始具有缓慢的反应,并且它将减小Kp的影响,但是当Kp值设置为高时,四旋翼直升机开始以较低的频率振荡。
在本教程中,我们在KK2.1.5飞行控制器的帮助下设计了一架四旋翼机。在这里,我们已经解释了从设置控制器到调整控制器的过程。在下一部分中,我们将解决一些问题,以使四旋翼直升机平稳飞行。