
参考设计简化了工业机器人电机控制
一种新的参考设计加速了工业机器人手臂末端工具的开发,该工具使用具有集成运动控制的单轴伺服控制器/驱动器模块。 Trinamic现在是Maxim Integrated的一部分,在亚太经合组织,包括其最新解决方案,该解决方案简化了工业机器人手臂...
一种新的参考设计加速了工业机器人手臂末端工具的开发,该工具使用具有集成运动控制的单轴伺服控制器/驱动器模块。
Trinamic现在是Maxim Integrated的一部分,在亚太经合组织,包括其最新解决方案,该解决方案简化了工业机器人手臂末端工具(EoAT)的开发,以及具有集成运动控制的单轴伺服控制器/驱动器。在接受Power Electronics采访时,Maxim Integrated工业通信副总裁Jeff DeAngelis以及Trinamic的业务管理总监Jonas Proeger和产品定义总监Stephan Kubisch强调了这些最新的解决方案,这些解决方案加快了各种工业自动化应用的开发时间。
TMCM-1617-GRIP-REF开源参考设计集成了一个面向现场的硬件控制器(FOC)和三个通信端口。它包括Maxim Integrated的MAX22000工业级IC、MAX22515 IO Link收发器(一种软件可配置的高精度模拟I/O)和MAX14906(一种用于配置单轴伺服驱动器操作模式的四通道数字I/O)。
新的TMCM-1321伺服控制器/驱动器模块旨在通过优化轴速度和同步以及减少功率损耗来优化两相双极步进电机的性能。Maxim Integrated指出,该设备集成了磁性编码器和光学编码器的数字输入,通过先进的反馈和诊断简化了伺服控制。
开源平台
“TMCM-1617-GRIP-REF参考设计的好处是,它能够将多个电路集成到一个板上,通常会分布在机械臂末端的多个板或组件上。这种紧凑的占地面积结合了简化的通信总线接口,减少了布线负担,并提供了一种在一个系统上移动数据和电源的简化方式单线或双绞线,以及正确调试工具的能力。DeAngelis说:“这种紧凑的尺寸和简化的通信和配置总线接口与我们的TMCL-IDE软件开发环境相结合,使其成为臂端工具的通用参考设计。”。他补充道,“除了紧凑的尺寸外,实现的另一个重要因素是该模块重量非常轻,为24克。”
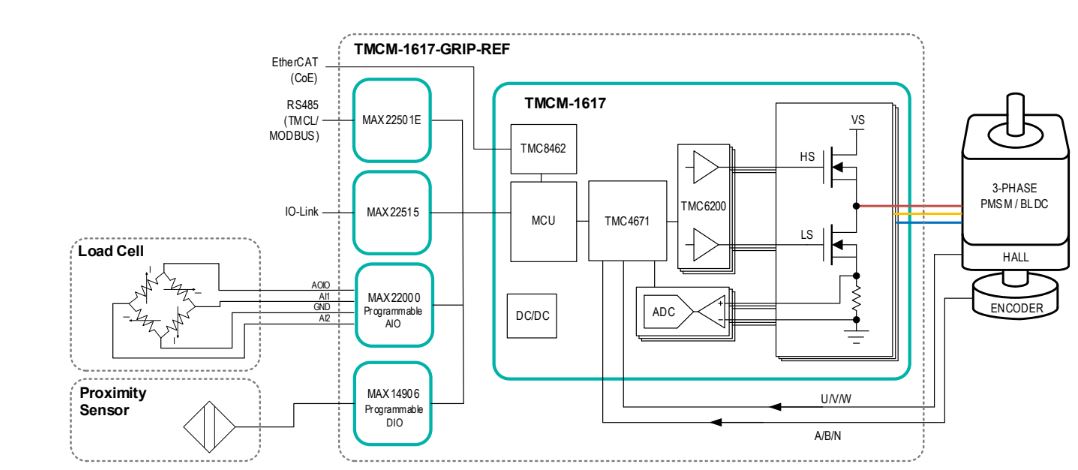
正如Proeger所描述的,图1的框图显示了一个测压元件,用于检测来自手臂、夹具或接近传感器的力。TMCM-1617-GRIP-REF支持工业通信协议EtherCAT、IO Link和RS-485,并提供模拟信号和软件可编程数字输入/输出,可以使用Trinamic运动控制语言集成开发环境(TMCL-IDE)进行配置。Proeger说:“我们提供了每秒100兆比特的RS-485通信选项,这一选项仍然很受欢迎。其优点是,它仍然是一种传统的高速布线,以满足这一应用的需求。从通信的角度来看,它是一种非常灵活的产品,是一种更传统的控制电机的方法。”。
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230419/tcm-16-figure1-pen.jpg">
图1:TMCM-1617-GRIP-REF的框图(来源:Maxim Integrated)
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230419/tmcm-1617-figure2.jpg">
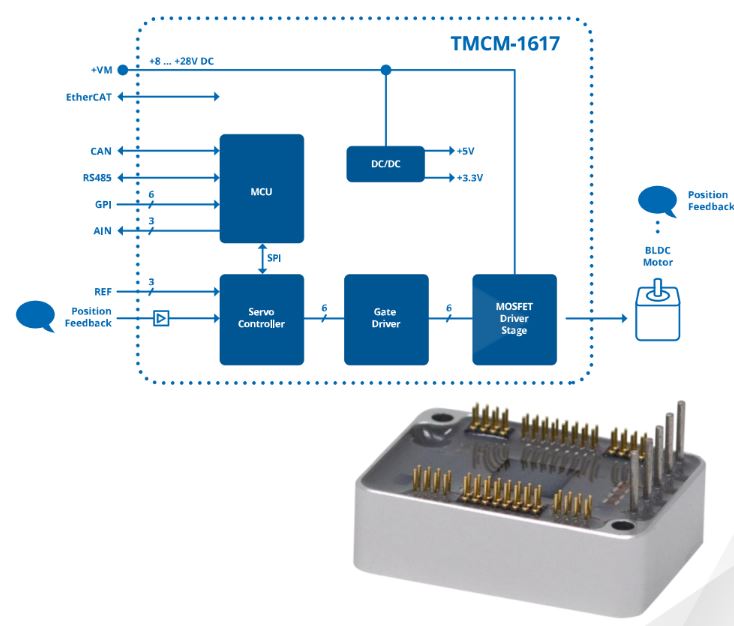
图2:TMCM-1617–最小伺服控制器(来源:Maxim Integrated)
Kubisch说:“我们提供所有所需的电源导轨,以支持外部外围设备和传感器,而不需要额外的电源。”。他补充道,“完美的电流控制对整个系统的效率影响最大。”
凭借最先进的总线架构,结合单一解决方案中的集成控制和诊断,Maxim integrated相信参考设计可以提高工厂的生产力,并将人工智能推向边缘。例如,MAX22515板载功能,如广泛的集成保护,以确保在恶劣的工业环境中进行稳健的通信。所有IO链路线路接口引脚(V24、C/Q、DI和GND)均具有反向电压保护、短路保护、热插拔保护,并具有集成的±1.2kV/500Ω浪涌保护功能。
对于电机和运动控制的未来,与对最终可靠性的需求相关的日益增加的复杂性将导致系统更加智能——这需要处于边缘,分散。决策需要实时做出,数据需要在源位置收集并在云中共享。
伺服控制器/驱动器TMCM-1321
TMCM-1321是一款用于两相双极步进电机的单轴控制器/驱动器,带有集成磁编码器和数字输入,所有这些都提供闭环控制逻辑,以优化电机控制。
Maxim Integrated指出,该板的外形尺寸要比其他解决方案小得多,并且该板支持256x微步进,无噪音操作。当合适的磁体连接到电机轴上时,可以使用集成磁性编码器,从而实现闭环操作。或者,可以通过ABN数字输入连接光学编码器。可以选择不同的坡道形状。除了线性斜坡和Trinamic SixPoint™ 斜坡,TMCM-1321模块实现了一个S形斜坡,可以加快实际传输时间。

<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230419/TMCM-1321-figure3.jpg">
图3:TMCM-1321的框图(来源:Maxim Integrated)
<img data-lazy-fallback="1" decoding="async" src="https://uploads.9icnet.com/images/aritcle/20230419/TMC-1321-board-figure4.jpg">
图4:TMCM-1321板(来源:Maxim Integrated)
TMCM-1321专为线圈电流高达0.7A RMS和24V直流电源电压而设计。三个数字输入可以用作端部开关和主开关输入,也可以用作通用输入。
电机控制和驱动在许多应用中都是基础,因为它们可以获得高精度,进而转化为更低的成本和更高的效率。电机控制电路执行的重要功能是确保转子在不同的操作和负载条件下获得与绕组有关的精确位置,以足够的精度确定其位置。
>>这篇文章最初发表在我们的姐妹网站上,电力电子新闻.