
大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家!
| 想要实现按下一个按键后舵机0 - 180度反复旋转,在通过串口发送度数后停止反复旋转并固定在指定角度。 在当前程序实验时发现如果在摆动时直接输入数字舵机会移动到对应角度,但是又会立马进行反复旋转。 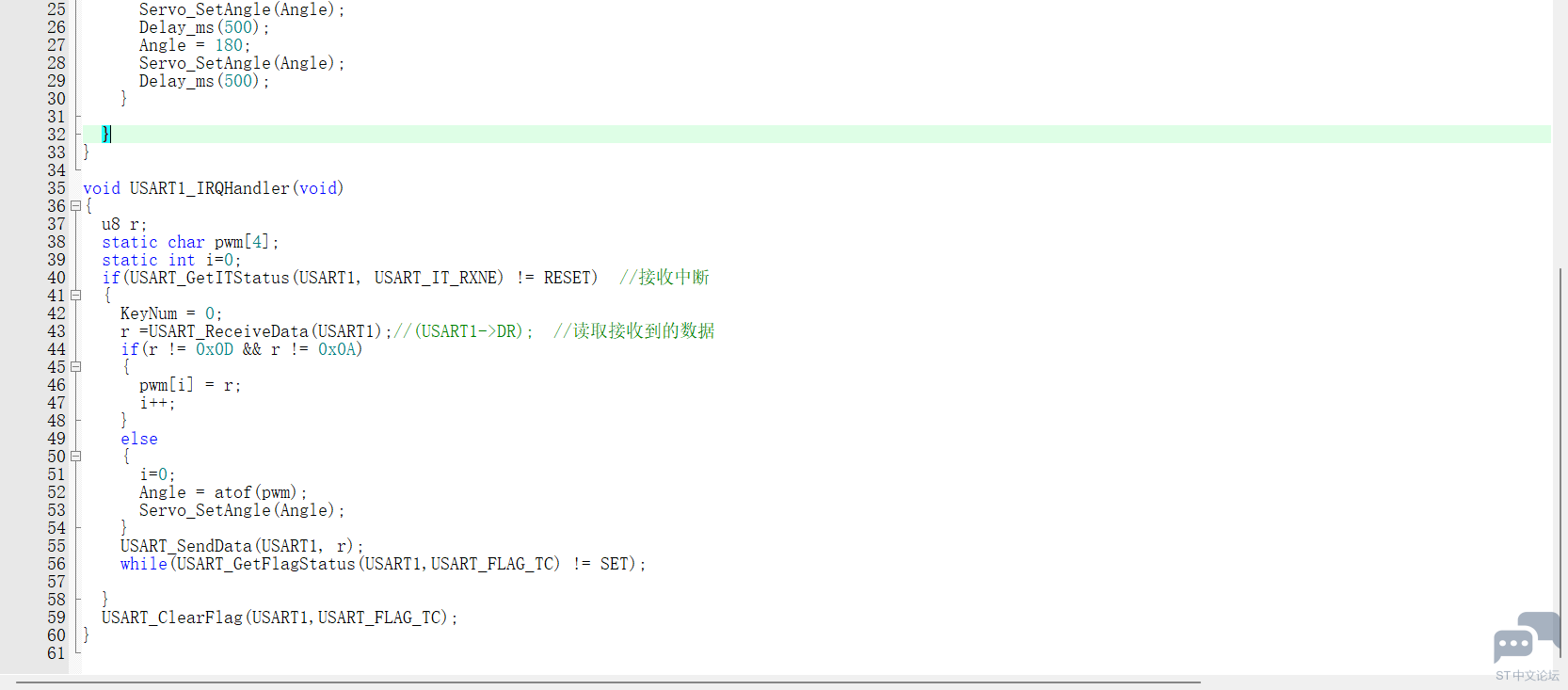 stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]' title='大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]' /> stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]' title='大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]' />
![大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]](https://uploads.9icnet.com/images/aritcle/20230620/155305noqu5yg3rzgtxog8.png "大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]")
![大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]](https://uploads.9icnet.com/images/aritcle/20230620/155305cbcghensyckw53dw.png "大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]")
![大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]](https://uploads.9icnet.com/images/aritcle/20230620/155305jmjfam27zmj17zb7.png "大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]")
![大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]](https://uploads.9icnet.com/images/aritcle/20230620/155305lkuzddvhvrvc77tr.png "大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]")
而且在复位后,输入90和180能够转到对应角度,而输入0时只能转到90度偏左的位置,而通过按键使摆动停止后,则可以输入0和180,但是输入90时无pwm输出。 一直不理解为什么不改变程序时结果会发生变化,附上了用到的函数的配置,希望各位大佬能够在闲暇之余稍作点拨,个人实在想不到哪里出了问题。 ![大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]](https://uploads.9icnet.com/images/aritcle/20230620/cry.gif "大家好!初学stm32,关于串口控制pwm舵机有些小问题一直想不明白,想要请教,谢谢大家! [相关图片]") |
 如需获得
如需获得 3个回答
 1+1=2 回答时间: 2023-07-26 19:43:52
1+1=2 回答时间: 2023-07-26 19:43:52你先了解一下PWM的占空比和舵机角度是怎么定义的,他们的对应关系是什么,然后再通过按键改变占空比试一下
 CoColokp 回答时间: 2023-07-26 20:14:49你先了解一下PWM的占空比和舵机角度是怎么定义的,他们的对应关系是什么,然后再通过按键改变占空比试一下 ...
CoColokp 回答时间: 2023-07-26 20:14:49你先了解一下PWM的占空比和舵机角度是怎么定义的,他们的对应关系是什么,然后再通过按键改变占空比试一下 ...你好!在之前已经测试过按键改变占空比了,是没有问题的。但是现在是程序没有改变时测试结果会不同,比如刚复位可以0,90,180.但是一循环后输入90时占空比就不生效了
- 1+1=2 回答时间: 2023-07-26 20:32:45你好!在之前已经测试过按键改变占空比了,是没有问题的。但是现在是程序没有改变时测试结果会不同,比如 ...
那用示波器看一下